Intelligent Medical Monitoring and Intervention
Machine perceptual systems and robotic assistants have the potential to revolutionize health-care.
Machine perception can provide the eyes and ears that monitor patient activity and vital measurements
while rootic assistants serve as the helping hands capable of assisting in certain interventions. In this
project, we build a system that employs multi-modal sensors and a robotic
platforms in a novel architecture for detection of regions of interest in a patient's health status from
medical sensors. Our goal is to enable a new kind of app development in medical applications.
This work is supported by the National Science Foundation (Award# CNS- 1205426).
An undergraduate researcher on this project is supported by the National Science Foundation (Award# HRD- 0928404).
A System for Interactive Data-Mining in Experimental Optics
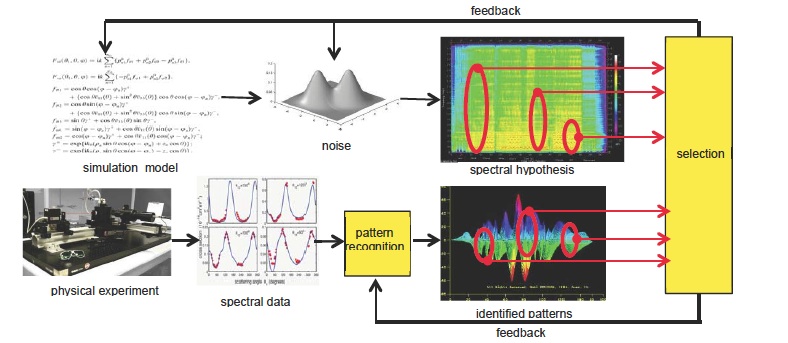
This project concerns the investigation, design, and implementation of a new integrated framework and software for
machine learning and data-mining on large volume and heterogeneous spectroscopic data. Our research focus is on
(i) discovery of the linkage between micro-scale and macro-scale phenomena within spectral data, (ii) semantic
databases for multi-spectral analysis, and (iii) interactive model-driven, data-driven discovery. Our goal is
an approach to an interactive system that will enable spectroscopists to discover new facts about spectroscopic data
and gain new understandings about spectrocopic techniques.
This work is supported by the National Science Foundation (Award# HRD- 1242067)
Ensemble Classifiers
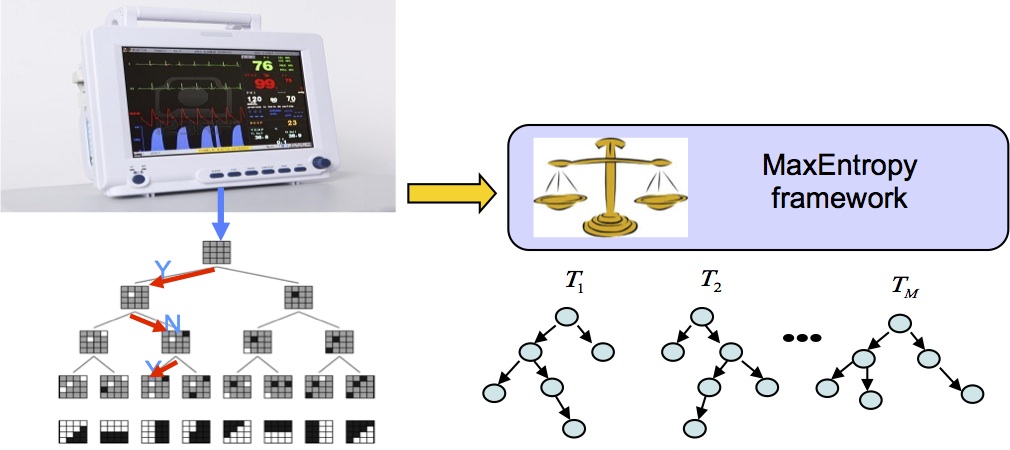
Ensemble methods in machine learning concerns the construction of high fidelity models for pattern learning by combining a number of simpler component models. If the error processes of the component models are diverse, one can build an aggregate model whose performance exceeds what is capable with a single model. Diversity in ensembles can be achieved by varying the factors that affect the error distribution and other performance characteristics of the component models. These factors include the feature representation of the input data, the training input selection and component model parameterizations. This work concerns work in understanding how error diversity affects the performance boost due to voting and aggregation methods for combining component models in ensemble methods. With a better understanding of why ensembles work, we can more deliberately construct ensembles that realize significant performance increases.
Factored Robot Architectures
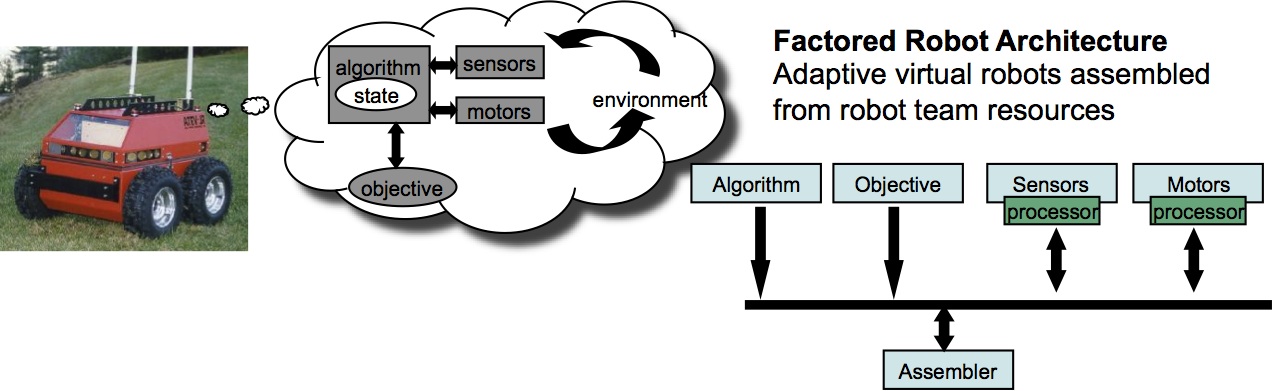
Autonomous systems perceive and act in the world through their sensory motor apparatus,
an algorithm, and some objective function. Each sensory motor device in a robot or sensor array
is typically coupled tightly to its compute node using custom access protocols. If we break apart,
or factor, our robots, adopt consistent interfaces for their access, and make them available across a
network, the robotic components become generalized sensory motor services. With this approach,
an application need not respect the bounds of a single physical box. The perceptual application
and the robot then becomes a virtual assemblage that can recruit arbitrary resources at run-time.
This work is supported by the National Science Foundation (Award# CNS- 1205426)
|
|